【主编推荐】专家论坛:机器人辅助腹腔镜肾部分切除术治疗肾门部肿瘤的体会
本文刊登在《现代泌尿外科杂志》2022年8期专家论坛栏目,点击文末的“阅读原文”按钮,直达本刊官网,下载本文PDF。
引用此文:王宏磊,李津乔,郭鹏宇,等.机器人辅助腹腔镜肾部分切除术治疗肾门部肿瘤的体会(“大家泌尿网”观看手术视频)[J].现代泌尿外科杂志,2022,27(8):623-627.


王宏磊:
医学博士。哈尔滨医科大学附属肿瘤医院泌尿外科。中国抗癌协会肿瘤大数据与真实世界研究专业委员会委员,中国中医药信息学会男科分会理事,中国中西医结合学会男科专业委员会青年委员,中国性学会手术学分会委员,黑龙江省医学会男科青年委员会副主任委员,黑龙江省医学会泌尿外科青年委员。获国家科技部"全国科学实验展"二等奖,黑龙江省医疗新技术奖一等奖等。
机器人辅助腹腔镜肾部分切除术治疗肾门部肿瘤的体会

王宏磊,李津乔,郭鹏宇,许涛,徐万海
(哈尔滨医科大学附属第四医院泌尿外科)
摘 要:肾门部肿瘤由于毗邻肾门结构,其术前定位、术中切除困难。机器人辅助腹腔镜肾部分切除术(RAPN)与传统开放式(OPN)、腹腔镜手术(LPN)相比优势明显、创伤更小,经多年发展已被广泛运用于肾门部肿瘤的治疗。3D打印、免阻断等新技术的应用更进一步降低了RAPN的难度和风险,同时能实现肾门部肿瘤手术“五连胜”。本文针对机器人应用于肾门部肿瘤的技术要点分享其在术前评估、手术技巧等方面的体会。
关键词:肾门部肿瘤;机器人;肾部分切除术
肾癌约占成人恶性肿瘤3%~5%[1]。作为肾癌手术中较为复杂的一种,肾门部肿瘤距离肾门部血管、集合系统不足5 mm, 手术难度大,易损伤肾门,对术者要求极高。对于肾门部肿瘤,传统的开放性肾部分切除术(open partial nephrectomy, OPN) 创伤大、出血多,易损伤腹部深层肌肉和筋膜,卧床恢复时间较长,预后相对较差,目前临床已较少应用。腹腔镜、机器人辅助下腹腔镜等新技术的出现让肾部分切除术的精准、微创、个体化治疗成为可能。
腹腔镜下肾部分切除术(laparoscopic partial nephrectomy, LPN)与OPN相比虽然有生存率更高、总失血量更少、住院时间显著缩短等优点,但在肾门部肿瘤中,无论是OPN还是LPN都具有一定局限性[2-3]。由于肾门部肿瘤与肾盂肾蒂距离过近,限制术者的视野及腹腔镜操作角度,存在误伤肾门的风险,术后出血、肾损伤和尿液渗漏等发病率显著上升。而达芬奇机器人的出现,极大地解决了上述问题。
针对肾门部肿瘤的技术难点,机器人辅助腹腔镜肾部分切除术 (robot-assisted partial nephrectomy, RAPN)是实现肿瘤切除“三连胜”的关键。自2004年GETTMAN等[4]第一次利用RAPN治疗肾癌以来,RAPN在肾门部肿瘤手术治疗中的有效性得到了长期验证。与LPN及OPN相比,RAPN失血量更少,术后恢复指标更好[5]。
达芬奇系统具有三维(three dimention, 3D)立体视野、高清晰度、高放大倍率的优势,可以进行多种精细手术。除此之外,还具有智能除颤等特性,避免了术者手部颤抖而误伤肾门血管的现象,解决了传统LPN在复杂肾门部肿瘤上角度受限的问题。通过术前R.E.N.A.L(Radius, Exophytic, Nearness, Anterior, Location)评分系统等制定手术计划,RAPN治疗肾门肿瘤在切除肿瘤和缝合伤口方面具有明显优势。哈尔滨医科大学附属第四医院自2019年引进Da Vinci® XiTM机器人系统以来,其在肾门部肿瘤手术中的安全性、精准性、患者预后方面均得到大量临床验证。与第三代达芬奇机器人相比,其易用性大幅增强,机械臂灵活性和精度均有所提升,并进一步在软件中融合辅助能力,增加激光定位功能,显著缩短了肾门部肿瘤的手术操作时间。然而,第四代达芬奇机器人建立Trocar的位置、手术操作等与以往的三代机有所不同,现将具体操作步骤分享如下。
2.1 术前评估
R.E.N.A.L评分是复杂肾肿瘤选择术式的重要参考指标之一。目前普遍认为R.E.N.A.L评分越低,越倾向选择LPN术式,而大于7分(中高危)的复杂肾门部肿瘤更加推荐RAPN术式。除使用传统的R.E.N.A.L评估确定手术方式外,增强计算机断层扫描(computed tomography, CT)、磁共振成像(magnetic resonance imaging, MRI)等影像学手段也被用于辅助定位肿瘤。但是,传统的影像学手段运用于肾门部肿瘤时,无法精确反映肿瘤位置。随着时代的进步,三维CT、3D打印等新技术逐渐被应用于临床,尤其是用于外科手术前评估。术前三维CT将病灶三维立体可视化,使医师可以从空间层面分析患者肾门部结构,从而制定更加精准的手术方案,选择合适的手术入路方式。3D打印技术在国内外已被广泛应用于多个科室的临床术前评估[6],其有效性得到了广泛验证。我院采用传统术前评估与3D打印技术相结合的方式,医患双方满意度均有所提升。然而受限于成本等问题,3D打印技术的种种优势无法大面积推广,实际临床中仅有少部分患者有需求并有意愿使用。
视频中的患者(详见文后大家泌尿网手术视频二维码链接)R.E.N.A.L评分为9A级,基于其较高的R.E.N.A.L评分(>7,中高危),我们决定采用RAPN术式。通过三维CT重建分析,该患者肿瘤位于右肾肾门部前唇(图1),囊实性,外突肾脏50%以上,毗邻肾动脉,手术难度较大,使用经腹腔途径RAPN是较好的选择。

A:肿瘤上极平面;B:肿瘤位于左侧肾门前唇,呈囊实性;C:如箭头所示,肿瘤边缘与肾动静脉关系密切;D:肿瘤下极平面。
图1 患者三维CT重建图
2.2 经腹腔途径RAPN治疗肾门部肿瘤操作要点
在患者开始手术前,经气管插管全身麻醉。患者处于90°健侧卧位,适度伸展腰桥,利于更好的暴露术野。于腹直肌外缘平脐点处使用气腹针穿刺,建立15 mmHg(1 mmHg=0.133 kPa)气腹。将镜头置入患侧距脐部斜上方3~4 cm处腹直肌外侧缘,长度为10 mm的切口中,并通过镜头检查穿刺针是否成功进入。两个10 mm Trocar分别放置于锁骨中线与肋缘下交点、腋前线处来定位1号(1)和2号(2)机械臂,使1号(1)、2号(2)孔与镜头孔(C)形成宽“V”字形120°夹角。于脐周下缘设置2号辅助孔(A2),镜头孔与1号机械臂孔连线中点水平与前正中线交点做1号辅助孔(A1),视情况也可在前正中线1号辅助孔上方加设一个3号辅助孔(A3),连接每个Trocar和机械臂(图2)。
2.2.1 游离动脉,寻找肿瘤
将双极钳连接1号机械臂、单极电剪连接2号机械臂。腹膜沿Toldt's线切开,切断结肠韧带,分离掀开结肠,松解肠道暴露筋膜(图3A),分离肾周筋膜与周围组织,露出下面的腰大肌,向肾门部解剖。使用双极钳将肾脏置于拉伸状态,游离暴露血管便于阻断(图3B),根据需要结扎静脉分支以显露肾门。
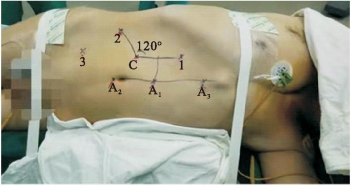
C: 镜头孔;1:1号臂;2:2号臂;3:3号臂——可替代2号臂;A1:1号辅助孔;A2:2号辅助孔;A3:3号辅助孔。
图2 经腹腔途径RANP孔径位置
腹腔镜超声探头用于定位肾肿瘤并确定切除边缘,也可以通过术前CT辅助确定肿瘤位置。切开Gerota筋膜,可以根据需求适当清除肾门部肿瘤周围的脂肪组织,并将这些脂肪组织送往病理科检验,据此分析肿瘤性质及浸润范围。暴露肿瘤时应注意不要损伤正常肾脏组织、肾动静脉血管、输尿管等(图3C)。也可使用彩色多普勒超声识别肿瘤血管,辅助定位肿瘤位置。
2.2.2 夹闭动脉,切除肿瘤
对于内生性肿瘤或邻近肾盂的肿瘤,应当在热缺血的条件下进行肿瘤切除。利用单极电剪在肿瘤周围进行标记划定范围。助手夹住肾门血管,在腹腔镜下使用bulldog肾动脉阻断夹,通过助手孔夹断所有肾动脉并记录缺血时间。使用机器人单极电剪沿先前刻划的标记边缘切除肿瘤,双极钳用于暴露肿瘤和辅助解剖(图3D)。此过程中务必保持肿瘤的完整性,注意不要误伤肾门结构。切除肿瘤的同时,助手使用吸引器保持术野干净。切除后,肿瘤可暂时放置在肾脏旁边或肝脏下缘,待手术完成取出。
2.2.3 缝合止血,松开阻断
术中止血通过单极电剪的烧灼、止血棉的填充和缝合实现。在SH针上使用3-0倒刺缝合线止血并修补集合系统破损,适当填充止血棉,必要时应用止血剂。缝合线使用可吸收的缝合线夹固定,也可以用打结的方式进行固定(图2E)。对于肾实质缺损,在SH针上使用2-0倒刺缝线荷包式缝合。缝合完成后将肾脏自然伸展状态放置,并由助手移除bulldog肾动脉阻断夹。确认无持续性出血后,切除的肿瘤标本放入回收袋中,并通过皮肤12 mm切口处取出,视情况扩大切口长度。在肾周间隙放置一个引流管,缝合皮肤创口,完成手术。
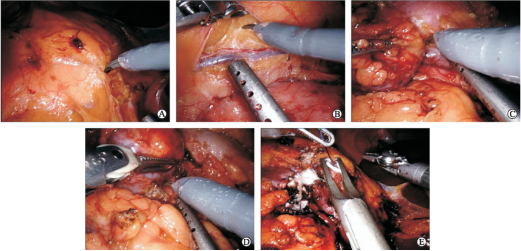 A:寻找筋膜;B:游离血管;C:暴露肿瘤;D:切除肿瘤;E:缝合创面。
A:寻找筋膜;B:游离血管;C:暴露肿瘤;D:切除肿瘤;E:缝合创面。
图3 经腹腔途径RAPN治疗肾门部肿瘤的操作要点
2.3 腹腔后途径RAPN治疗肾门肿瘤的操作要点
经气管插管全身麻醉,使患者处于健侧卧位。于患者腋中线与第十二肋缘下交点处,使用气腹针穿刺建立15 mmHg气腹。选取腋中线与髂嵴交点上方三横指处,作一2 cm横行切口。将镜头置入切口,并通过镜头检查穿刺针是否成功进入。寻找肋缘与髂嵴垂线中点作水平线,该水平线与腋后线交点为机械臂1号臂位置(1)。1号臂(1)水平与腋前线交点处为2号臂位置(2)。类似经腹腔途径,两机械臂与镜头孔(C)形成宽“V”字形(夹角约150°),于镜头孔腹侧5 cm作辅助孔(A)。将机械臂对接入各孔,开始手术(图4)。
马里兰双极钳连接2号机械臂(2),单极电剪连接1号机械臂(1)。腹腔后途径无需破坏腹膜与结肠韧带,清理肾门周围脂肪以便寻找肾脏,打开肾周筋膜,向肾门解剖。从肾脏后方游离暴露肾动脉准备夹断,根据需要决定是否结扎静脉分支。使用腹腔镜超声探头辅助定位肾门部肿瘤并确定切除边缘,也可以通过术前CT、术中彩超辅助确定肿瘤与肾门结构的位置关系。
切除肿瘤与缝合止血方法同经腹腔途径RAPN,此处不再赘述。
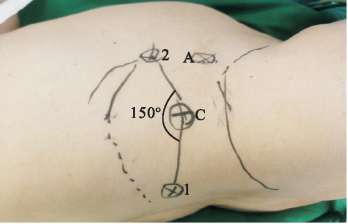
1:1号臂;2:2号臂;A:辅助孔;C:镜头孔。
图4 腹腔后途径RAPN孔径位置图
对于肾门部肿瘤的肾部分切除术(partial nephrectomy, PN),HUNG等[7]提出了手术成功“三连胜”的概念,即切缘阴性、保护肾功能、减少并发症的发生。在此基础上,我们提出了肾门部肿瘤切除“五连胜”,并将其分为2个部分:肿瘤控制与生活质量。关于肿瘤控制有以下3点指标:理想的肿瘤学效果、手术切缘阴性、避免肿瘤种植。而生活质量的提升有2个条件:保护肾功能、减少并发症的发生。以上2大点5小条,即为复杂肾门部肿瘤切除的“五连胜”,是成功实施肾门部肿瘤部分切除术的手术目标。
肿瘤因素、血管因素、患者因素3点决定了疾病复杂程度,进而影响手术方案的制定。肿瘤本身状态是最重要的因素。肾门部肿瘤位置多变,部分内生的肿瘤定位较容易,但完全内生肿瘤只能通过超声定位。当肿瘤位于肾门前唇、肾脏腹侧等位置时,多选择经腹腔途径RAPN。而位于肾门后唇、后内侧、后外侧、肾脏背侧的肿瘤则更适合采用腹腔后途径RAPN。血管因素决定了手术难度。肾血管畸形是常见的血管因素,术前评估需考虑畸形血管位置,术中充分暴露并结扎,避免干扰手术角度与视野,防止误伤大出血。当存在副肾动脉时应同肾门动脉一并夹闭。患者因素需要全面的术前评估诊断,包括异常解剖结构、术前肾脏功能、既往手术史、年龄、体重指数(body mass index, BMI)等。
出血是术中最常见的突发情况,正确的缝合方式可有效减少出血。肾门部肿瘤行部分切除术后,创面的对齐缝合以倒刺针为主,倒刺结构可以有效防止出血和针头滑脱。缝合方式一般选择荷包式缝合,操作简单,缝合牢固。如果创口过大过深对齐困难,可以选用环形“C”字缝合来减少出血。若集合系统损伤严重,则使用“V”字形创面重构缝合法缝合深浅两层,以此重构创面。术中出血的创面缝合难度较高时,应填充止血棉、喷洒止血剂止血。
腹腔后途径RAPN相较经腹途径,手术时间短,术后恢复快。其优势在于可以迅速找到肾蒂,直接处理肾动脉,分离范围和影响相对较小。但由于腹膜后手术空间相对狭窄,缺乏明显的解剖标志,操作相对受限,在进行复杂RAPN如肾门部肿瘤切除时,手术难度明显增加,对操作镜头的助手要求更高。在进行腹腔后途径RAPN时要注意腹膜不应破裂。若腹膜破裂必须及时止血修复,否则会因大量气体漏入腹腔,进而导致腹膜后间隙不足,使得手术更加困难。
热缺血时间与患者术后肾功能的保留息息相关,时间越长,肾功能越差。因此,肾盂旁手术在精准切除的同时,要做到“又快又准”,尽量缩短热缺血时间。夹闭肾动脉前,充分暴露肿瘤及肾门结构,制定切除计划。在夹闭后立即按计划切除,发现肿瘤有分支动脉供血时应当一同夹闭。切除时最大程度保证剩余正常肾组织完整,利于术后肾功能恢复。在热缺血方面,机器人的热缺血时间较短,比传统腹腔镜手术后患者肾功能恢复更快。标准的RAPN需要阻断肾动脉,带来热缺血及缺血-再灌注损伤等不良影响。针对上述血管损伤及热缺血等一系列问题,一些学者应用“免阻断”(免缝合)技术解决此问题。免阻断技术在术中不阻断肾动脉,不缝合肾脏,而是通过双极电凝、铥激光等凝固创面止血,减少肾脏缺血。然而,通过免阻断技术减少肾缺血,术中的出血量就会相应增加,使手术更加困难,这就要求术者做到“更快更准”。达芬奇机器人在未夹闭动脉时,其快速、准确的优点符合免阻断技术的要求,最大化地减少了术中出血。虽然免阻断技术在一些个案研究中显示术后肾脏功能恢复良好,但实际临床效果仍缺乏大量远期数据支持,作者对此技术持谨慎观望态度。
传统的肾癌扩大切除术是早期肾门部肿瘤最常用的手术方式,由于损伤与并发症多,预后相对不佳,已逐渐退出历史舞台。取而代之的肾癌根治性切除术(radical nephrectomy, RN) 和PN令患者生存率大大提高,成为了肾门部肿瘤主要的术前评估与手术手段。近年来,随着现代生物医学理念的流行,最大化地保留正常肾实质存活,最小化地减少肾脏缺血时间已成为业界共识,“精准切除”成为了术者和患者共同的需求,基于以上需求,RAPN术式逐渐兴起。
达芬奇机器人的大规模应用,既解决了切除缝合困难的问题,又能够避免损伤重要的肾门结构,极大地降低了手术风险。其较短的平均热缺血时间,给患者带来了更好的术后肾功能指标。虽然达芬奇机器人有诸多优点,但其高成本仍是RAPN推广的主要障碍。肾门部肿瘤的复杂性决定了机器人手术的适用性,但绝大部分肾脏肿瘤通过低成本的LPN即可切除,RAPN在切除效果没有明显优于LPN的情况下,带给患者的成本要高出LPN数倍,致使选择机器人术式的动力不足。尽管成本较高,仍不能抵消RAPN所具有的各项优势,只有当成本进一步降低,达到性能与价格的平衡时,经济因素才不会成为其进一步推广的阻力。
从早期的OPN,到如今主流的LPN,越来越多的患者受益于保留肾单位手术及其背后的“精准切除”理念。机器人手术技术改进了LPN的技术缺陷,有助于精确切除肿瘤。在复杂多变的手术环境里,机器人系统的可视化和精确度保证了手术的成功率,使得外科技术有了进一步的发展,在“微创”的同时又做到了“更加精确”。达芬奇辅助下肾部分切除术是治疗肾门部肿瘤的一种安全可行的方法。对于复杂的肾门部肿瘤病例,机器人系统可以充分发挥精准快速的优势,实现肾癌切除“五连胜”。
附:“大家泌尿网”本文手术视频链接http://www.cug.top/video/1995/手机及其他移动端读者扫码直达。
本刊投稿唯一途径《现代泌尿外科杂志》官网
网址:http://jmurology.xjtu.edu.cn/
编辑部电话: 029-82657054
请勿相信其他任何网站或个人代理投稿,谨防上当受骗。
点下面的“阅读原文”下载本文PDF。
现代泌尿外科杂志 ∣您的伙伴
小提示:87%用户已下载掌上医讯App,更方便阅读和交流,请扫描二维码直接下载App

(本网站所有内容,凡注明来源为“掌上医讯”,版权均归掌上医讯所有,欢迎转载,转载请注明出处,否则将追究法律责任。凡是本网站注明来源为其他媒体的内容为转载,版权归原作者所有,转载仅作分享,文章观点不作为掌上医讯观点,如有侵权,请及时联系我们,联系电话:0532-67773733)
